
[기계신문] 한국전자기술연구원(KETI)이 수작업 위주의 전통식품(김치, 전통장류) 분야 자동화 공정을 위한 로봇 작업지능 인식시스템 기술을 개발했다.
대표적인 K-푸드인 김치는 비정형 특성과 쉽게 찢어지는 성질을 갖고 있어 그동안 양념이 된 김치를 직접 잡아주는 그리퍼(Gripper) 기술이 부재하였으며, 이에 따라 판매용 포기김치를 합포장하는 공정은 대부분 수작업에 의존하고 있었다.
또한, 고추장 등 전통장류의 경우 역시 규격별로 제품을 인식하고 함께 포장하는 지능 기반의 그리퍼 기술이 확보되지 않았기 때문에, 합포장 공정의 대부분은 자동화 적용이 어려운 상황이었다.
KETI 지능로보틱스연구센터 김영욱 박사 연구팀은 2절 포기김치를 안전하고 안정적으로 파지(Grip)할 수 있는 전용 그리퍼를 개발하여 수요기업의 실 공정에 적용하기 전 테스트베드에서 실험 중이며, 전통장류 합포장 기술은 테스트베드 내 검증을 끝내고 수요기업인 ㈜사조산업 실제 공정에 적용할 예정이다.
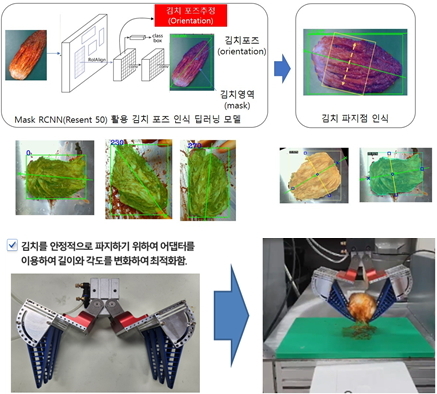
구체적으로 연구팀은 비정형의 김치를 집을 수 있도록 ▲김치의 위치와 영역을 인식하는 딥러닝 모델 ▲그리퍼 팁(끝 부분) 유연화 ▲세척에 용이한 내부 구조 등 식품 특성에 최적화된 그리퍼 기술을 개발하였고, 전통장류의 경우에도 규격 및 영역을 인식하여 제품을 집는 기술을 개발하였다.
이번 연구과제를 총괄하는 신준호 책임연구원에 따르면, 기술 적용을 통해 기존 수작업 공정 대비 김치 합포장 시 최적의 충진율을 안정적으로 확보할 수 있으며, 전통장류 역시 공정 자동화로 인해 생산성 향상이 기대된다.

KETI 황정훈 지능로보틱스연구센터장은 “KETI는 로봇 및 인공지능 기술을 활용하여 식품 생산공정뿐만 아니라 제조업 등 폭넓은 분야의 공정 자동화를 연구하고 있다”며 “인공지능 기반 로봇 분야 국내 핵심 연구기관으로서 로봇기술 상용화 및 국내 기업의 글로벌 시장 진출 지원에 최선을 다하겠다”고 밝혔다.
이번 연구는 과학기술정보통신부, 정보통신기획평가원(IITP)의 ICT융합산업혁신기술개발 사업 중의 ‘식품공장 생산성 향상 및 유연 포장 자동화·최적화를 위한 5G MEC 프레임워크 개발’ 과제로 추진되었다.
기계신문, 기계산업 뉴스채널