
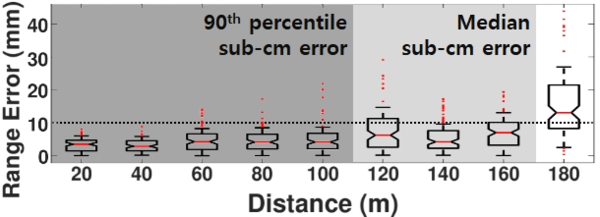
[기계신문] KAIST 전기및전자공학부 김성민 교수 연구팀이 무전원 태그를 통해 세계 최초로 160 m 장거리에서 7 ㎜(5 m 단거리 0.35 ㎜)의 정확도와 1,000개 이상의 위치를 동시 인식하는 초정밀·대규모 사물인터넷(IoT) 위치인식 시스템을 개발했다.
이는 사물인터넷 기기와 로봇의 미세한 움직임을 조종하고, 나아가서는 초실감형 XR(확장현실) 및 초정밀 스마트팩토리 등 가상세계에서 현실과 연결을 시키게 하는 인식기술이다.
연구팀이 최초 개발한 무선 태그는 그 신호가 방해 신호와 주파수 영역에서 완전히 분리되어 신호의 질을 100만 배 이상 향상시킨다. 이를 이용하여 초정밀 위치인식이 가능해지는 원리다.
해당 기술을 접목하면 XR에서 다량의 사물인터넷을 손가락의 미세한 움직임만으로 쉽게 제어할 수 있는 등 몰입감을 크게 높일 수 있다. 또한 1,000개 이상의 태그를 0.5초 이하에 동시 인식할 수 있어 수많은 기기를 실시간 조작할 수 있다.
이 기술은 현존하는 실내외 위치인식 기술 중 작동 범위, 정확도 및 규모에서 성능이 월등하여 그 의미가 깊다. 특히 최신 실내 측위 기술인 차세대무선기술(UWB, Ultra Wide Band)에 비해 300배의 정확도, 10배의 탐지 거리, 100배의 확장성을 갖는다.

이는 현재에 비해 훨씬 많은 기기를 정밀하게 다룰 수 있음을 의미한다. 또한, 실외 측위에 한정되는 GPS 위치 인식 기술과 달리 다양한 실내외 환경에서 활용될 수 있다.
이 기술의 태그는 스스로 무선 신호를 생성하는 대신, 주변의 신호를 반사하여 통신한다. 마치 거울과 같은 원리로, 신호 생성에 필요한 전력을 아낄 수 있어 초저전력으로 동작한다. 이에 태양전지 등 무전원으로 동작하거나 코인 전지 하나로 40년 이상 구동할 수 있어 대량 운용에 적합하다.

김성민 교수는 “이번 성과를 통해 스마트팩토리 등 산업체를 넘어 XR 등 민간에서도 포괄적으로 사용 가능한 IoT 상호적용 기술로 전방위적인 위치인식 기술의 보급을 가능하게 할 것으로 기대된다”고 말했다.
한편, 삼성미래기술육성사업과 정보통신기획평가원의 지원을 받아 수행된 이번 연구는 KAIST 전기및전자공학부 배강민 박사과정과 문한결 박사과정이 공동 주 저자로 참여했으며, 연구 성과는 모바일 시스템 분야 국제학술대회인 ‘ACM MobiSys’ 2023에 지난 6월 발표됐다.
기계신문, 기계산업 뉴스채널