[기계신문] 한국기계연구원이 심장, 폐, 방광 등 중재시술에 사용하는 로봇 카테터 시스템을 개발, 국내 부정맥 환자의 효과적인 치료 및 관련기업의 기술 경쟁력 강화에 청신호가 될 것으로 기대된다.
기계연구원 대구융합기술연구센터 의료로봇연구실 김기영 선임연구원 연구팀은 심장, 폐, 방광과 같은 인체 장기에 삽입 가능한 유연 굴곡 형태의 로봇 카테터를 개발했다. 장기에 삽입 가능한 로봇 카테터 시스템은 국내 최초다.
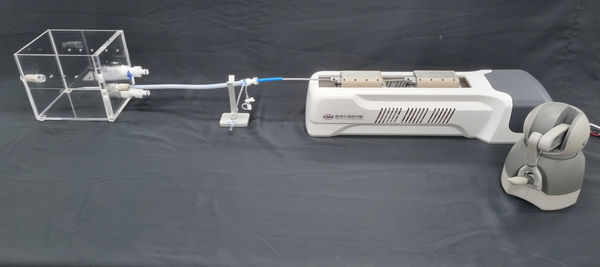
이번에 개발된 로봇 카테터는 굴곡 가이딩 카테터다. 기존 굴곡이 가능한 카테터는 한 방향으로만 휘어졌지만, 기계연구원 연구팀이 개발한 로봇 카테터는 두 방향으로 휘어짐이 가능해 원하는 위치로의 이동이 쉽고 조작이 간편하다. 또한 2개의 가이딩 카테터로 구성돼 있어, 바깥쪽 카테터는 고정하는 역할로 흔들림을 잡아주고, 안쪽의 카테터는 유연한 이동이 가능하게 했다.
참고로, 가이딩 카테터(Guiding Catheter)는 시술 등 치료를 위한 카테터가 장기 조직 손상 없이 깊이 삽입되기 위해 해당 위치까지 안내하는 역할을 하는 카테터를 말한다.
연구팀은 로봇 카테터의 구조강성을 변화시켜주는 ‘가변강성제어’ 기술로 장력 조절을 구현했다. 구동와이어의 한 가닥마다 하나씩 모터를 일대일로 연결해 동작이 되도록 개발하여 구동와이어의 장력을 측정해 연결된 모터로 전달하는 방식이다.
이러한 시스템을 통해 로봇 카테터를 삽입할 때는 낮은 강성으로 부드럽게 삽입해 장기 조직이 다치지 않도록 보호하고, 시술 작업 시에는 높은 강성으로 로봇 카테터가 지지대 역할을 하므로 시술을 쉽게 할 수 있다.
개발한 로봇 카테터는 스프링을 사용한 기존 외산제품과 달리 부드러운 튜브 형태로 더 유연하여 조직 손상이 적다. 인체 주요 장기에 현재 활용하고 있는 수동 카테터의 재료와 열처리 방법을 동일하게 사용해 인체 사용에 대한 안전성도 동일하게 확보했다. 또, 로봇 시스템으로 작동하기 때문에 부정맥 진단 과정에서 발생하는 의료진의 방사능 피폭도 줄일 수 있다.
이번 연구는 산업통상자원부의 ‘산업기술혁신사업-3차원 심장 매핑 시스템 및 혈관 가시화 기술 기반 지능형 심혈관 중재시술 보조 로봇 시스템 개발’ 과제의 지원을 받아 의료로봇 관련기업 및 서울아산병원 등 의료계와 공동 협력을 통해 수행됐다.
기계연구원 김기영 선임연구원은 “이번 성과는 방사능 피폭을 줄일 수 있는 로봇 카테터 시스템을 국산 기술로 개발한 성과로, 로봇 기술을 이용해 카테터의 조작을 간편하게 하고 강성을 제어한 점에서 의미가 있다”며 “앞으로 기업과 병원 등 다양한 기관과의 협력 및 상용화를 위한 후속 연구를 통해 심장, 폐, 방광 질환 환자들에게 도움이 되도록 하겠다”고 말했다.
기계신문, 기계산업 뉴스채널